宁子博客
关于
归档
友链
随机
切换模式
返回顶部
首页
生活
学习
作品
宁子博客
首页
生活
学习
作品
关于
归档
友链
随机
ABB工业机器人基础入门学习笔记
学习
·
2023-11-24
宁子
机缘巧合下我参加了ABB工业机器人的学习,经过这段时间的学习,感觉自己对其些许兴趣,现整理基础入门学习笔记,用以往后复习。  ### 基础知识: RAPID程序由程序模块(Program)与系统模块(Systemmodules)组成 可以根据不同的用途创建多个程序模块 每一个程序模块包含了程序数据、例行程序、中断程序和功能四种对象,但不一定在一个模块中都有这四种对象,程序模块之间的数据、例行程序、中断程序和功能是可以互相调用的。 在RAPID程序中,只有一个主程序main,并且存在于任意一个程序模块中。并且是作为整个RAPID程序执行的起点 课件: 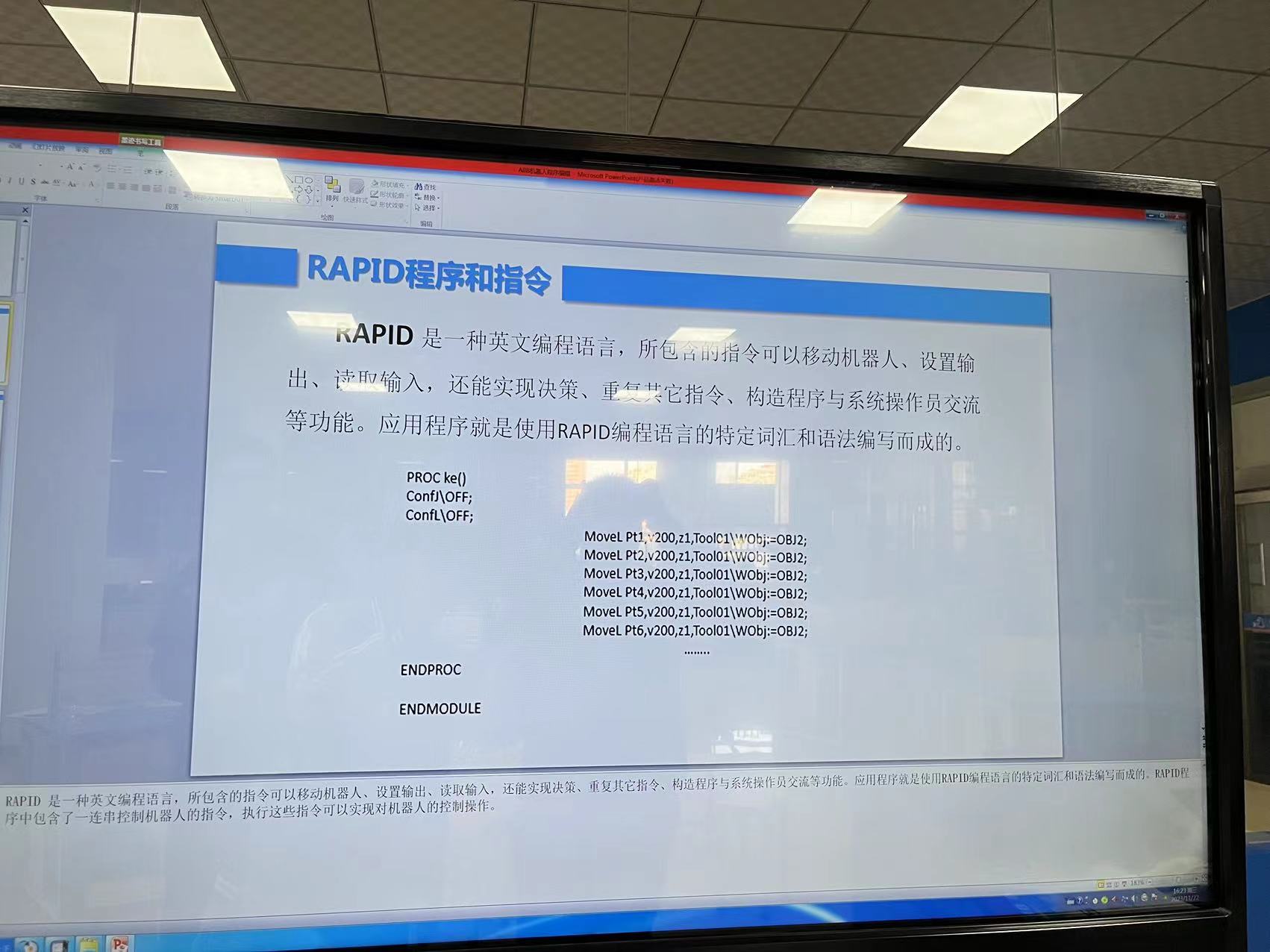 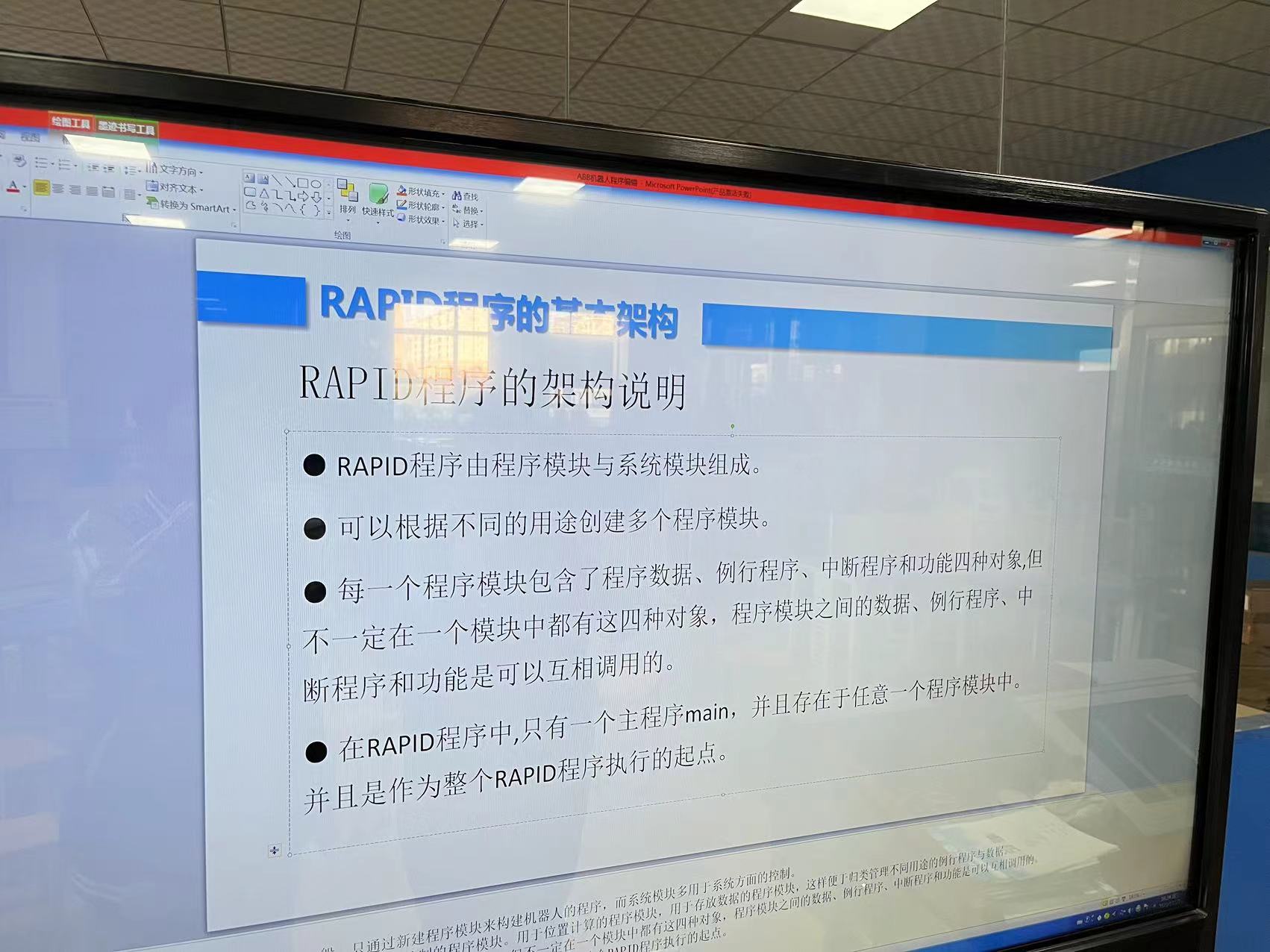 ### 1.线性操作和坐标系 整个机器人的基座标系都采用笛卡尔坐标系,移动时采用X,Y,Z这三个方向移动,使用操作杆就可以向8个方向移动(包括上下移动) 顺时针拧动操作杆是下降机械臂,反之逆时针是上升 其他的方向朝左就向左,朝右就向右 在练习的第一天我撞了2次机,第2次属于非常严重的撞机,从此之前我也变得熟练了后再没有撞机失误后,如果此时看本文的你是初学者如果发生撞机请不要慌张,这对于初学者来说正常的不能再正常了,发生撞机联系你的师兄或导师(摇人,切莫自己操作。 关于奇点:当5轴和4轴的连杆处于在同一水平,就会出现奇点 ### 2.工具坐标和工件坐标 #### 工具坐标 工具坐标即TCP(Tool Center Point)(我第一次听还以为是网络协议里的TCP协议哈哈) 工具坐标设定方法: 1.先新建工具坐标,修改新建的工具坐标的值。 2.这里还需要设置mass值,即质量,不能超过3,因为机械臂的最大承载重量(质量)是3kg。 3.还有定义工具的重心,比如0,0,20。 4.进入后选择TCP,3点,操纵机器人,用3种不同的姿态触碰到要标的地方的点。 #### 工件坐标 采用三点法,X1确定原点, x2确定X 轴及x正方向,Y1确定y正方向。 在操作的过程中不需要设置Z轴,设置X轴的2个点和Y轴的一个点即可 工件坐标设定方法: 1.先新建工件坐标,修改新建的工件坐标的值。 2.设置X轴的2个点和Y轴的一个点一共三个点作为参考点。 3.手动校验 ### 3.简单的轨迹移动 从这一步开始,正式开始了ABB工业机器人的学习 #### 常见运动指令: MoveAbsJ指令:移动到指定的绝对位置 MoveL指令:直线线性运动 MoveJ指令:不一定是直线,可以带点互动的线性运动 Movec指令:划圆弧和圆运动 #### 轨迹移动 代码示范:MoveL p10, v200, file, tool1\WObj:=wobj1; 建议设置成file,直接运行到指定位置,z50之类的会在进入50的数值后弧形更快的线性运动 电脑端测试代码运行效果示范: [WeChat_20231124233135.mp4](https://blog.itzhiyin.com/usr/uploads/2023/11/2217292221.mp4) ### 4.简单的抓取和吸取 这2个东西就需要用到PLC主板了,电脑可能无法操作(至少我在学校大屏幕试了好久都不行)。 先设置一个IO信号,比如说抓取可以设置为“zhua”,吸取设置为“xi” 参考之前的MoveL指令移动到目标物体上方后可以先测试的向下尝试一下抓取,可以使用示教器右上角的快捷按钮,设置这个在控制面板中设置, 移动到上方后,设置向下移动到差不多的位置,然后添加Reset,后面加上之前设置的IO信号,比如“zhua”,注意此时添加一下停顿的程序。waittime=0.3之类的,之后添加home质量,回到初始位置 吸取同理,修改IO信号为“xi”即可。 ### 5.循环程序IF,FOR,WHILR FOR 循环指令:想让一个或多个指令重复运行时,使用该指令 IF 条件指令:满足条件仅需要执行多条指令时,可使用该指令 WHILE 循环指令:该指令当循环条件满足时,重复执行相关指令 代码示范: IF <exp> THEN “满足上述条件必须x运行到2后要运行的程序” ENDIF 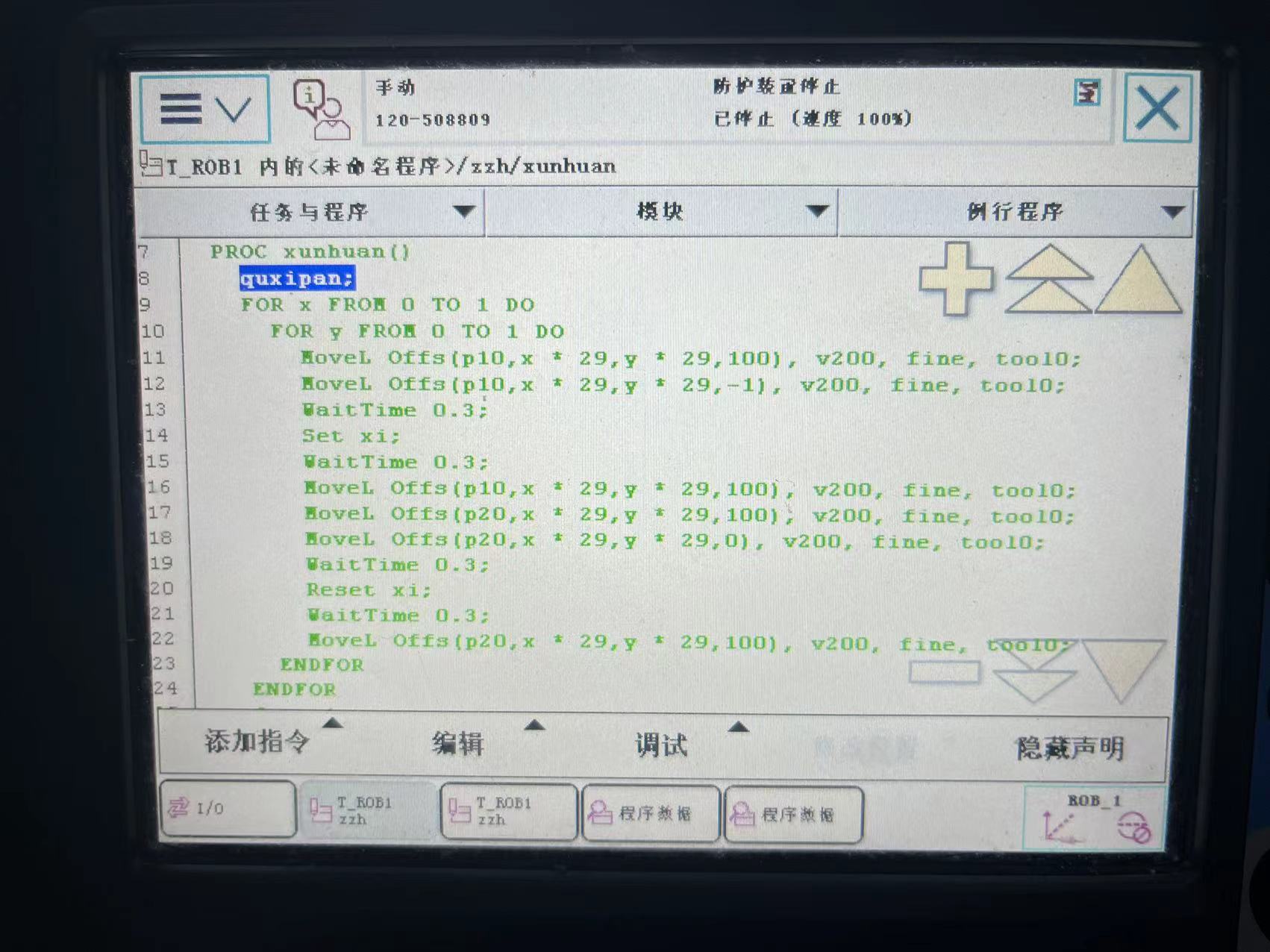 这就是我本周的学习笔记,再接再厉!
ABB工业机器人
工业机器人
ABB工业机器人学习笔记
ABB工业机器人编程基础
取消回复
提交评论
天天赚
2024-08-18
回复
好东西,学习学习。
名人查
2023-12-15
回复
这个适用哪种数控机床机器?
宁子
(作者)
2023-12-15
回复
@名人查
abb机器人
袁明艳
2023-12-14
回复
宁子
人生得意须尽欢
钢铁直男
中二少年
努力ing
热门文章
【开源】我开发了一款Wordpress自定义鼠标样式插件
ABB工业机器人基础入门学习笔记
【开源】闲的无聊,我做了一款Wordpress一键崩溃宕机插件(整活娱乐)
【开源】我做了一款WordPress替换前端字体插件
论王侯将相是否真的有“种”
学习新思想,争做新青年
【公益】我做了2年的免费CDN和虚拟主机:织音云站长扶持计划
最新评论
不语: 龙虾适合极客折腾,骡子适合普通人干活。是骡子是马,遛了才知道,反...
Josephsnors: 这个页面 认真地 帮助别人。继续! 遊樂設施 欣赏你的照片, 我...
姓名祥批: 这个插件会有人用吗?哈哈
Hsukqi Lee: 你站SSL证书过期了,不符合要求3(网站必须配备有效的HTTPS...
姓名祥批: 我用的阿里云的香港主机,拨测一片红...
姓名祥批: 应该会影响网站速度吧
菊座: 感谢分享! 第二个表情箭头可以从眼睛里面射出来
热门标签
WordPress替换前端字体插件
宝塔面板防火墙拦截POST请求
C语言竞赛漏洞排查教程
王侯将相是否真的有“种”
ABB工业机器人
工业机器人
ABB工业机器人学习笔记
ABB工业机器人编程基础
Wordpress一键崩溃宕机插件
成都世界线漫展
免费CDN
免费虚拟主机
织音云站长扶持计划
织音云
tiny11builder
关于站长
itzhiyin
admin@itzhiyin.com
ITZHIYIN.COM
CC BY-NC-SA 4.0
陕ICP备2026005936号-1
陕公网安备61050202000719




好东西,学习学习。
这个适用哪种数控机床机器?
abb机器人